法律を専門としている者にとっては,自動運転の法律問題の検討はややとっつきにくいように思います。
理由の一つは,自動運転技術の理解の難しさだと思います。
そこで,自動運転技術を理解するための基礎知識についてコンパクトにまとめてみました。
最低限これだけ頭に入れておけば,ざっくりした議論にはついていけるはずです。
1 走行機能の要素等
ドライバーは,従来型の自動車を運転する際には常時
「認知」→「判断」→「操作」
という三つの作業を継続的に繰り返し行っています。
すなわち,
視覚と聴覚で道路状況や車両状態を「認知」し,
その情報を基にどのような反応をすべきかを「判断」し,
その結果に従って手や足を動かして「操作」することにより運転をしています。
また,自動車の機能には,「加速」,「操舵」,「制御」の三つの要素があります。
従来型の自動車では
「加速」→アクセル
「操舵」→ハンドル
「制御」→ブレーキ
によって行われています。
自動運転においては,これらの一部又は全部を自動車のシステムが担うこととなります。
2 自律型システムと協調型システム
自動走行のためのシステムには,「自律型システム」と「協調型システム」があります。
「自律型システム」とは,車両に設置したカメラ,ミリ波レーダー,レーザーレーダー等を通じて走路環境を認知する技術により,自動運転を行うシステムです。
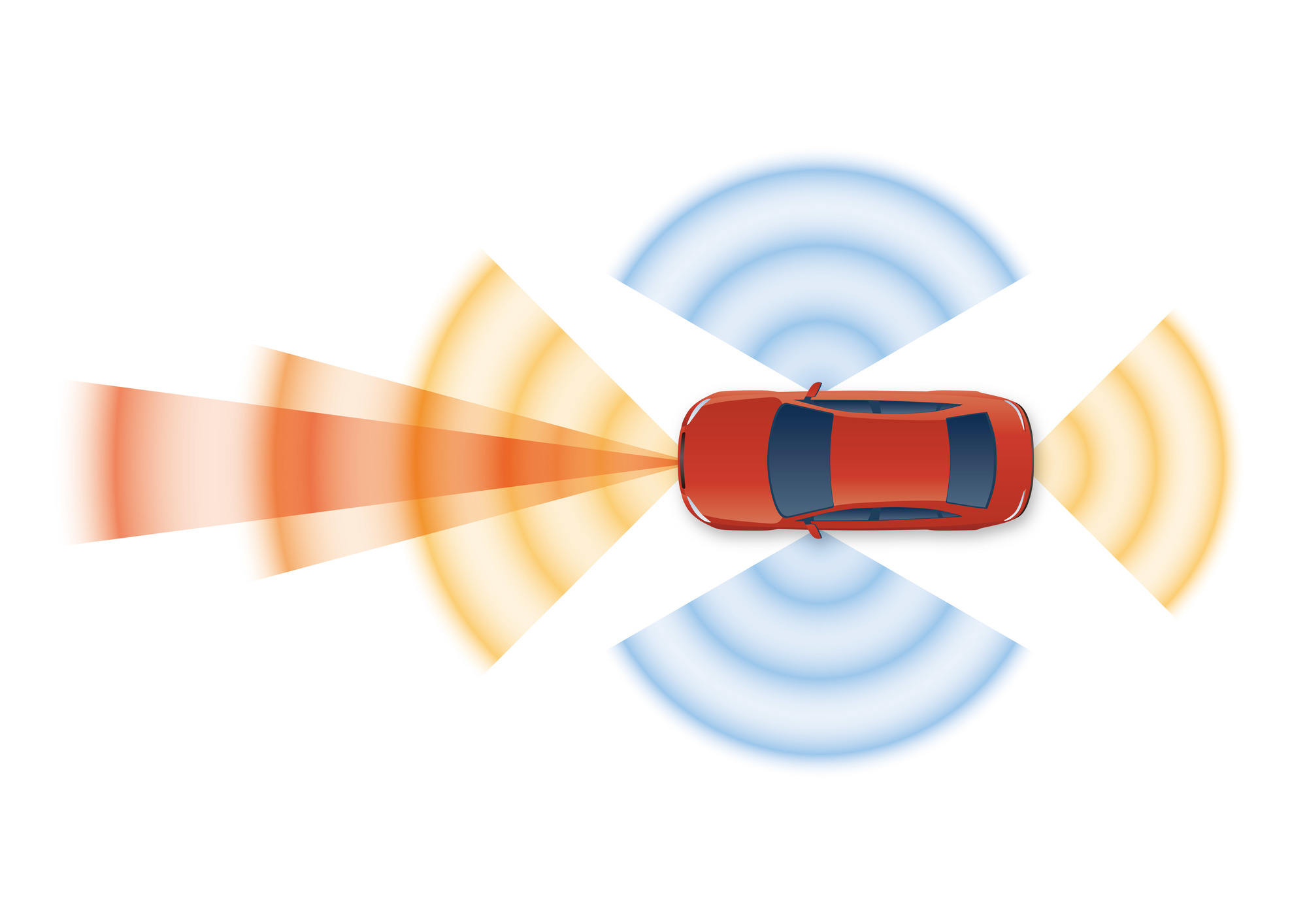
自律型システムのイメージ
これに対し「協調型システム」とは,車両に設置したカメラ,ミリ波レーダー,レーザーレーダー等だけでなく,車両同士又は車両外部からの通信を利用して走路環境を認知する技術により,自動運転を行うシステムです。
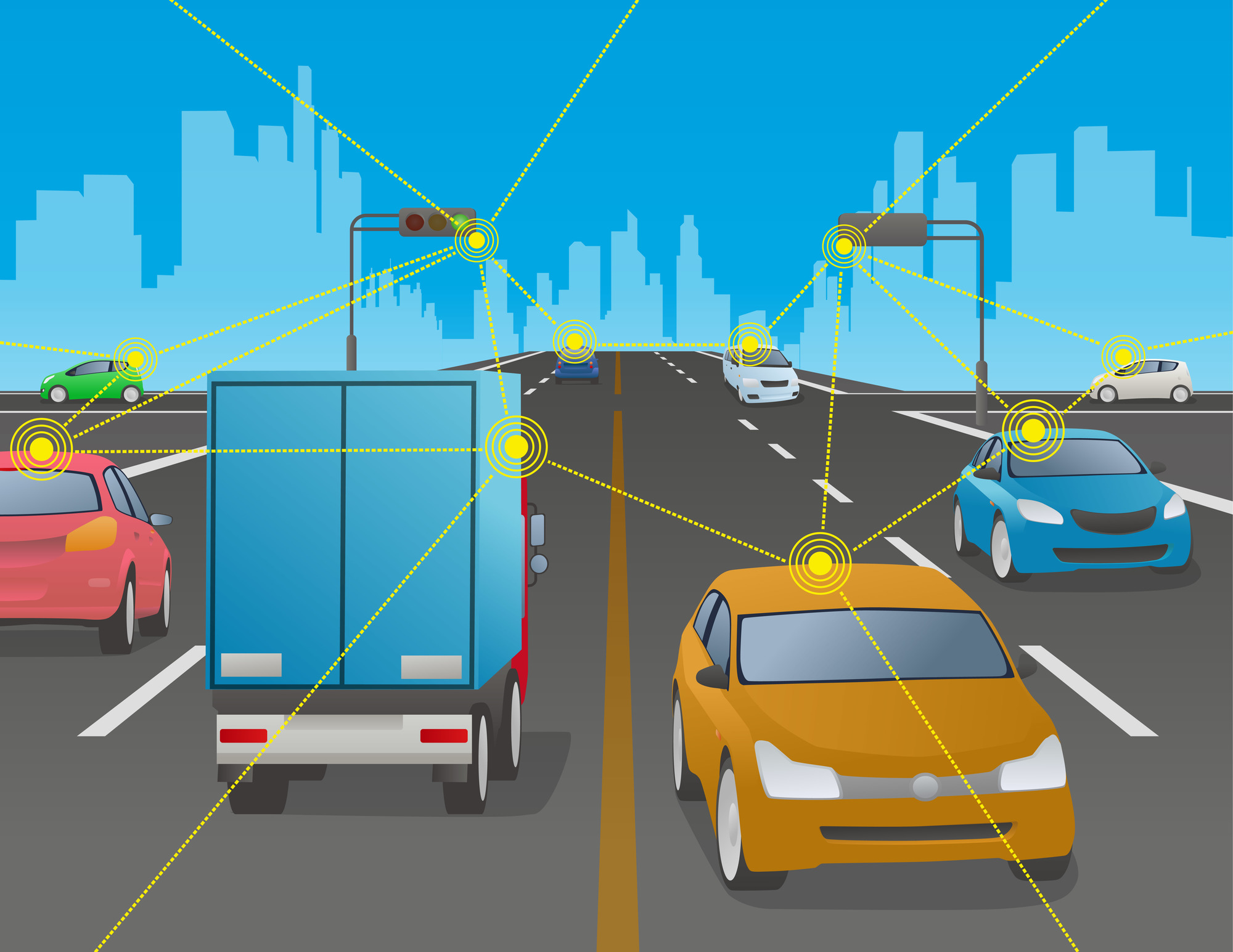
協調型システムのイメージ
3 自動運転のレベル
自動運転は,複数のレベルに分かれています。
自動運転のレベルについては,様々な国や様々な組織において様々な定義がなされてきました。
ただ,2017年1月現在では,2つの定義を押さえておけばよいと思います。
一つは,日本政府が2016年度まで使用していた5段階の定義です。
もう一つは,日本政府が2017年度から使用する6段階の定義です。
3-1 5段階の定義
内閣には,高度情報通信ネットワーク社会推進戦略本部が設けられています。
そして,同本部は,2014年から毎年「官民ITS 構想・ロードマップ」という政策文書を発表しており,この文書の中に自動運転の定義を定めています。
この「官民ITS 構想・ロードマップ」の2016年度版までは5段階の定義が使用されていました。
この5段階の定義は,今後は使用されなくなると思いますが,2016年以前に作成された文章を読む際に注意する必要があるため,簡単に触れます。
(表は,スマートフォン版表示ではスクロールしないと見れませんが,PC版表示ではスクロールなしで見れます。)
| 分類 | 概要 | |
| 情報提供型 | ドライバーへの注意喚起等 | |
| 自動制御活用型 | レベル1:単独型 | 加速・操舵・制御のいずれかの操作をシステムが行う状態 |
| レベル2:システムの複合化 | 加速・操舵・制御のうち複数の操作を一度にシステムが行う状態 | |
| レベル3 :システム の高度化 | 加速・操舵・制御の全てをシステムが行い,システムが要請したときのみドライバーが対応する状態 | |
| レベル4 :完全自動 走行 | 加速・操舵・制御を全てドライバー以外が行い,ドライバーが全く関与しない状態 | |
3-2 SAEにおける定義
内閣高度情報通信ネットワーク社会推進戦略本部の事務局であるIT総合戦略室は,2016年12月,SAEインターナショナルの6段階の定義を採用することを提案しました。
そのため,「官民ITS 構想・ロードマップ」の2017年度版からは,SAEインターナショナルの定義が採用されると思われます。
SAEインターナショナルとは,自動車,航空機等の技術の専門家の国際的な団体です。
SAEインターナショナルの定義は,既に国際的スタンダードになっており,国連の会議でもこの定義を参考としており,アメリカやイギリスもこの定義を参考にしています。
SAEインターナショナルの定義自体はかなり複雑ですが,「官民ITS 構想・ロードマップ」2017年度版の定義ではこれを簡易化した表現になると思われます。
(表は,スマートフォン版表示ではスクロールしないと見れませんが,PC版表示ではスクロールなしで見れます。)
| レベル | 名称 | 定義 |
| ドライバーが一部又は全ての動的運転タスクを行う | ||
|
0 |
運転自動化なし | ・ドライバーが,全ての動的運転タスクを実施する。 ・アクティブセーフティシステムによって支援されている場合を含む。 |
| 1 | 運転支援 | ・自動運転化システムが,持続的に,特定の運行設計領域において,前後・左右方向のいずれか一方(同時に両方ではない)の車両制御に係る動的運動タスクのサブタスクを行う。 ・ドライバーが残りの動的運動タスクを行う。 |
| 2 | 部分運転自動化 | ・自動運転化システムが,持続的に,特定の運転設計領域において,前後・左右方向の両方の車両制御に係る動的運転タスクのサブタスクを行う。 ・ドライバーが対象・事象検知・反応のサブタスクを完遂し,自動運転化システムを監視する。 |
| 自動運転システム(「システム」)全ての動的運動タスクを行う(作動中の場合) | ||
| 3 | 条件付き運転自動化 | ・自動運転システムが,持続的に,特定の運転設計領域において,全ての動的運転タスクを行う。 ・フォールバックに備えるユーザーが,自動運転システムの発する介入要求及び他の車両システムでの動的運転タスク実施関連のシステム故障に対し,適切に対処する。 |
| 4 | 高度な運転自動化 | ・自動運転システムが,持続的に,特定の運行設計領域において,全ての動的運転タスク及び動的運転タスクフォールバックを行う。 ・ユーザーが介入すべく要求に応じることは期待されていない。 |
| 5 | 完全運転自動化 | ・自動運転システムが,持続的に,無条件で(特定の運行設計領域ではない),全ての動的運転タスク及び動的運転タスクフォールバックを行う。 ・ユーザーが介入の要求に応じることは期待されていない。 |
4 開発における方向性
現在,多数の企業が自動運転技術の開発を行っているところ,開発の方向性は,大きく二つに分かれます。
一部の企業においては,従来型の自動車を出発点として,ドライバーによる運転に対する運転支援システムの高度化の延長線上としての自動運転車を目指しています。
典型例は,トヨタです。
これに対し,一部の企業においては,ドライバーとシステムとの権限移譲時の危険性に対する懸念を一つの根拠として,最初から完全自動運転の自動車を目指しています。
典型例は,Googleです。
どちらのアプローチが合理的であるかは,法的議論の範囲外なので,それについてはさておきますが,このような開発状況から予想できるのは,今後道路において様々なレベルの自動運転車が混在する状況が生じ,その状況が一定期間続くことであろうということです。そのため,法規制は複雑になり,事故時の法的責任関係も複雑になると思われます。
5 参考文献
内閣高度情報通信ネットワーク社会推進戦略本部「官民ITS 構想・ロードマップ」2016年度版
内閣官房IT総合戦略室「自動運転レベルの定義を巡る動きと 今後の対応(案)」