
自動運転に関する法律問題を検討するには,道路交通条約について理解しておく必要があります。
なぜなら,道路交通に関係する法律として最も重要な法律は,道路交通法であり,この道路交通法の上にある規定が道路交通条約だからです。
現在,国連において,自動運転技術の発展に対応していくため,道路交通条約に関する議論が急ピッチで進んでいます。
この議論を理解するため,今回は,道路交通条約の従前の規定と,2016年3月までの国連における議論の状況について確認していきたいと思います。
この点を理解しておくことで,現在の道路交通条約に関する議論の状況をすっきり理解できようになると思います。
目次
1 従前の規定
道路交通条約には,2つの条約があります。
1949年ジュネーブ道路交通条約と1968年ウィーン道路交通条約です。
日本は,前者を批准しており,後者を批准していません。
1-1 1949年ジュネーブ道路交通条約
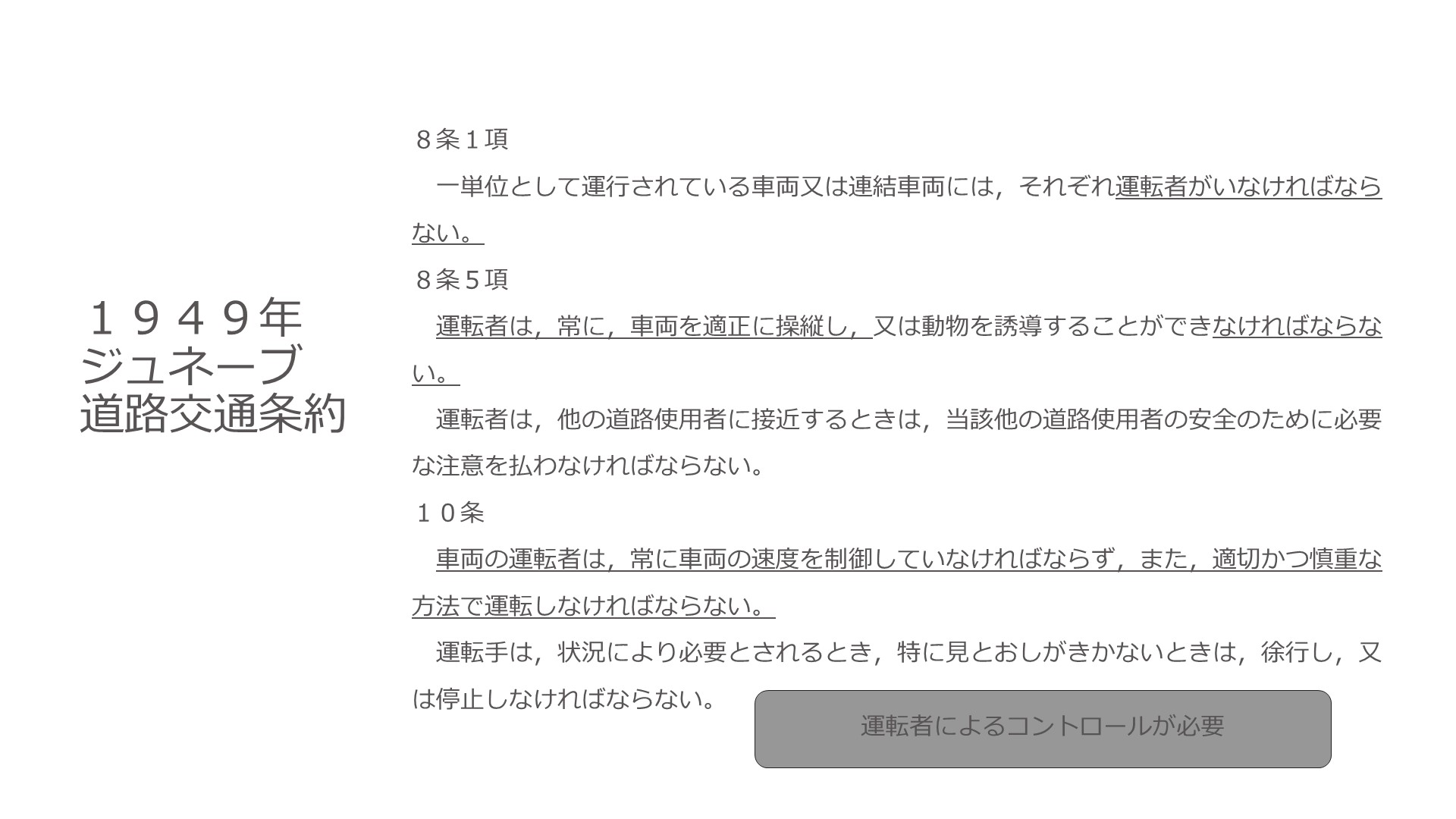
まず,日本が批准している1949年ジュネーブ道路交通条約について,自動運転に関わる規定を確認します。
ジュネーブ道路交通条約は,第8条第1項で,自動車にはドライバーがいなければならないとし,第8条第5項と第10条で,ドライバーによるコントロールがなされなければならないと規定しています。
1-2 1968年ウィーン道路交通条約
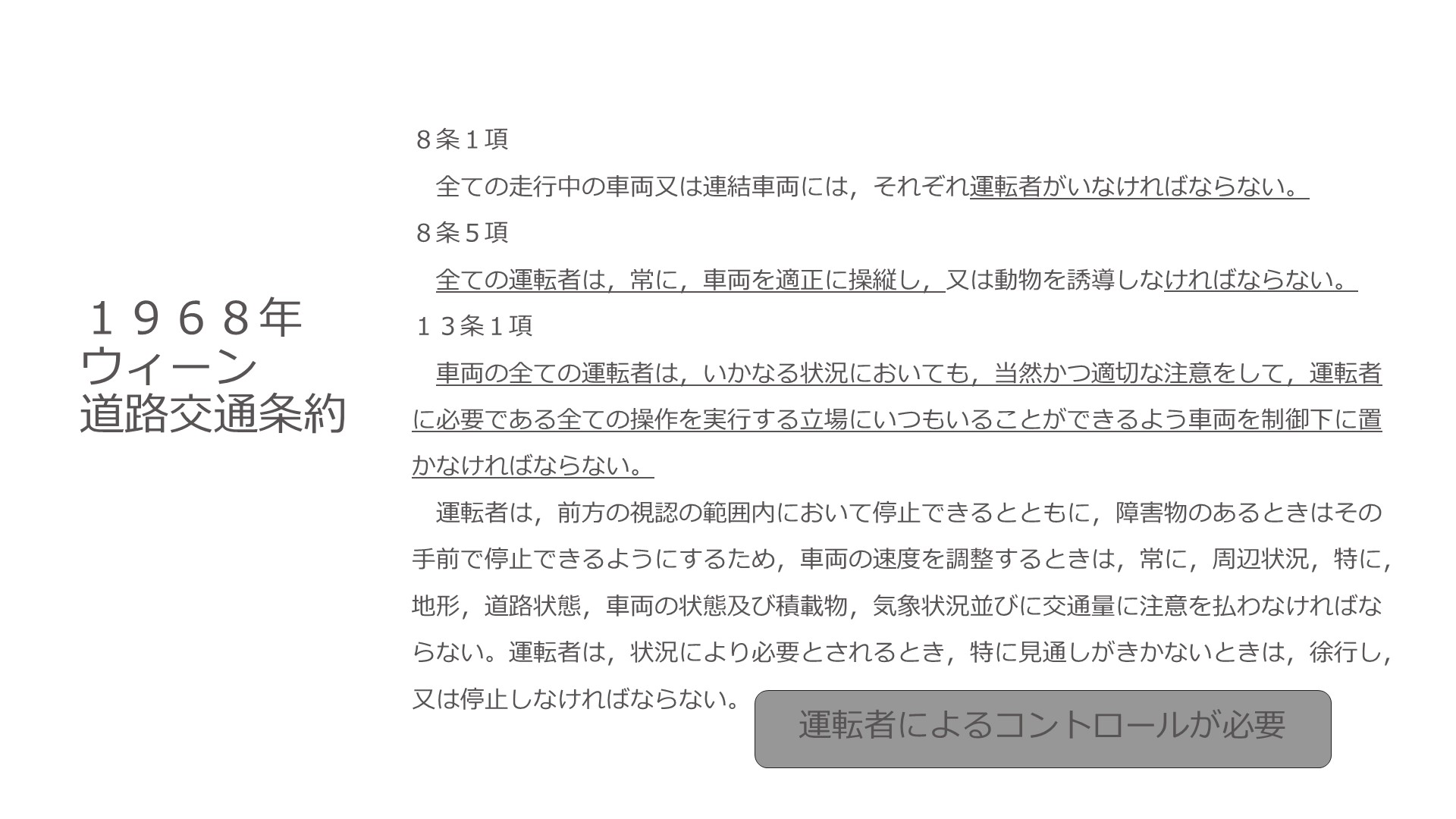
次に,日本が批准していない1968年ウィーン道路交通条約について,自動運転に関わる従前の規定を確認します。
ウィーン道路交通条約は,従前,第8条第1項で,自動車にはドライバーがいなければならないとし,第8条第5項と第13条1項で,ドライバーによるコントロールがなされなければならないと規定していました。
2 2016年3月までの議論状況
道路交通条約の改正に関する議論は,国連の欧州経済委員会の「INLAN TRANSPORT COMMITTEE」の下にある道路交通安全作業部会(WP1)で進められています。
WP1における議論について,2016年3月までの議論の状況を確認していきたいと思います。
2-1 従前の規定に関する問題意識
前記のとおり,二つの道路交通条約の従前の規定は,細かい文言は異なるものの,どちらの条約も,自動車にはドライバーがいなければならないとし,ドライバーによるコントロールがなされなければならないと規定していました。
そして,従前,「ドライバー」とは人間であり,「コントロール」とは,ハンドルを握って,アクセルやブレーキを操作し,車を動的に動かすことを前提としていました。
そのため,自動運転技術を導入していくためには,道路交通条約を改正することは必須だという認識の下に,二つの道路交通条約の改正の議論が進められました。
2-2 1968年ウィーン道路交通条約の改正案採択
道路交通条約の改正の議論は,1968年ウィーン道路交通条約(日本は批准していない。主な批准国はヨーロッパ。)が先行して行われていきました。
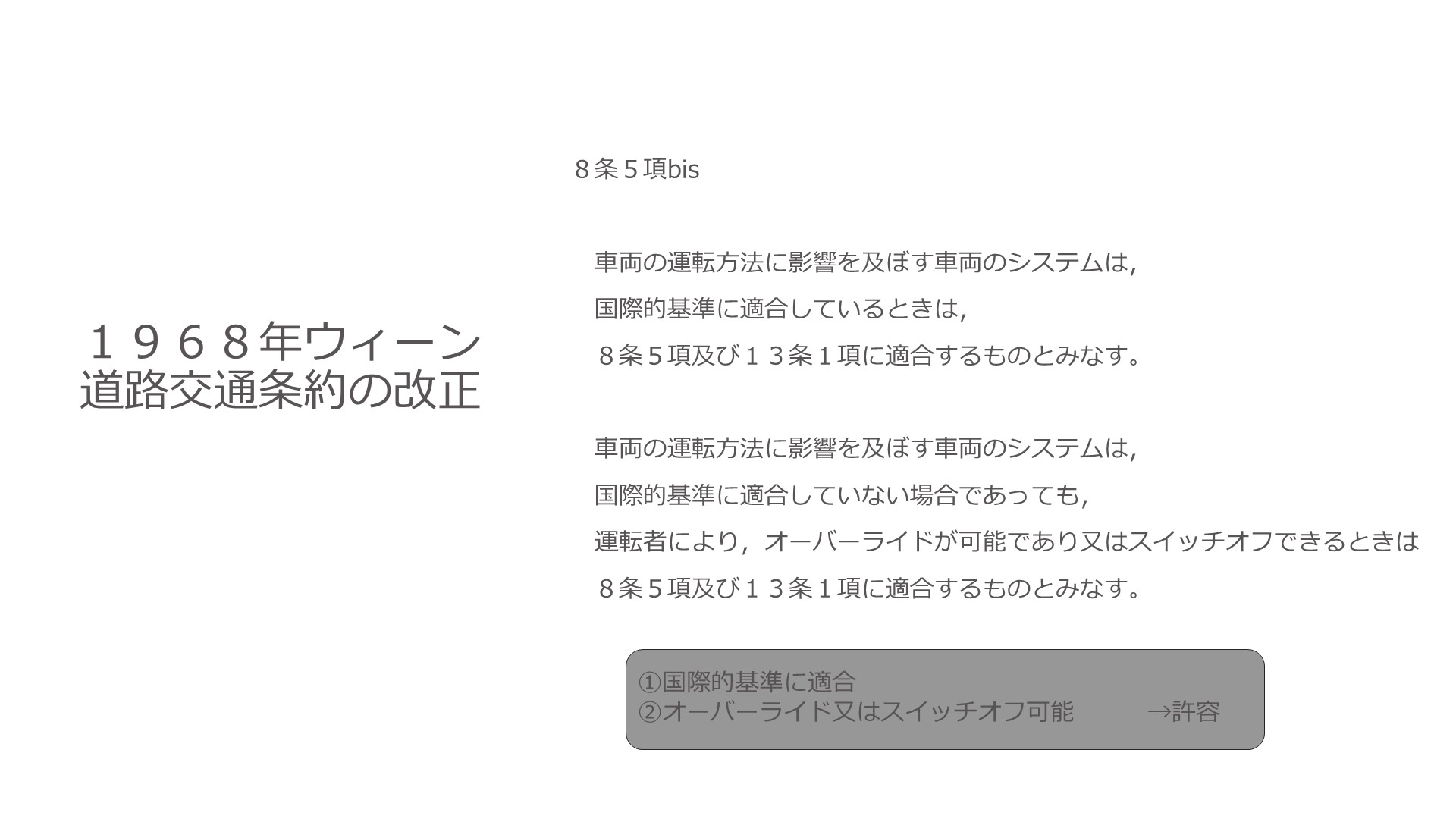
改正案の主な内容は,次のような第8条第6項の規定を加えることです。
長い条文ですが,簡単に言うと,自動運転システムが国際基準に適合している場合又はドライバーによる運転者による優先制御又は電源切断が可能な場合は,道路交通条約上許容されるという内容です。
この改正案は,2014年3月に採択されました。
2-3 1949年ジュネーブ道路交通条約の改正案採択
1968年ウィーン道路交通条約に一足遅れて,1949年ジュネーブ道路交通条約(日本が批准。他の主な批准国はアメリカ。)についても改正に向けた議論が進められました。
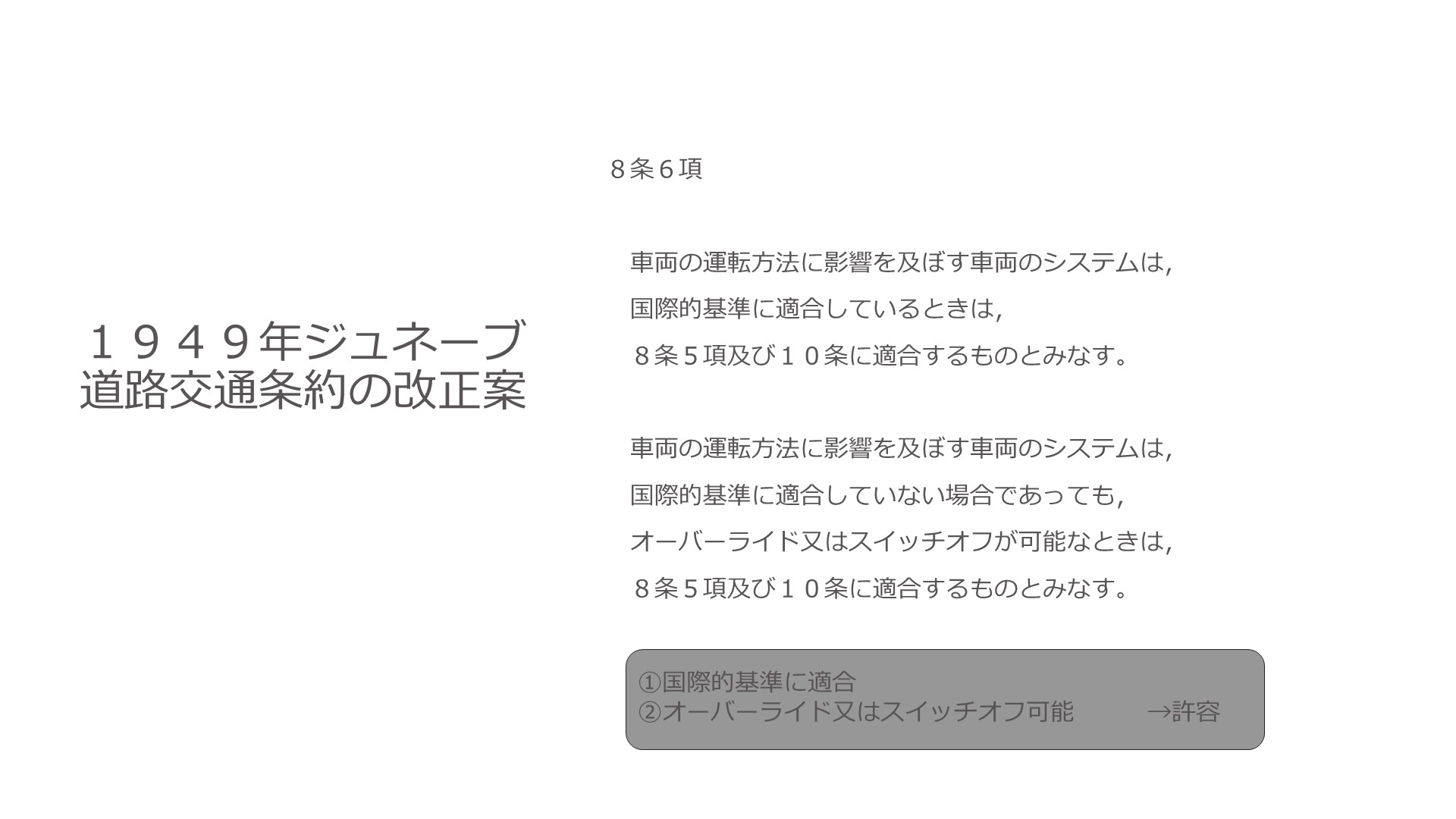
改正案の主な内容は,次のような第8条第5項bisの規定を加えることです。
長い条文ですが,簡単に言うと,自動運転システムが国際基準に適合している場合又はドライバーによる運転者による優先制御又は電源切断が可能な場合は,道路交通条約上許容されるという内容であり,1968年ウィーン道路交通条約の改正案と全く同じ内容です。
この改正案は,1968年ウィーン道路交通条約から1年遅れて2015年3月に採択されまし
2-4 施行状況と問題発生
このように,二つの道路交通条約については,全く同じ内容での改正案の採択が行われたわけですが,条約の効力が生じるためには,改正案が採択されるだけではなく,それに続いて批准国の多数の賛成を得なければならず,多数の賛成が得られて初めて改正が施行され,効力が生じることになります。
そして,二つの道路交通条約のうち,日本が批准していない1968年ウィーン道路交通条約は,批准国の多数の賛成を得て,2016年3月に施行に至り,効力が生じました。
ところが,日本が批准している1949年ジュネーブ道路交通条約は,批准国の多数の賛成が得られず,採択はされたものの,施行に至らず,効力が生じないままになってしまいました。
そのため,2016年の段階で,自動運転に関する規定について,両輪のような二つの道路交通条約でずれが生じてしまうという問題が発生してしまいました。
そこで,2016年から2017年にかけて,WP1においては,この問題を解決するための議論をしなければならない状況に陥ってしましました。
その後の議論の状況については,別の記事で詳しく書いていきたいと思います。
3 遠隔型の自動運転車両の公道実証実験の許容の合意
なお,以上のような改正に関する議論とは別に,2016年3月,WP1では,画期的な合意がなされました。
すなわち,WP1は,自動運転の公道実証実験に関し,自動車を制御するドライバーは,自動車内にいるか否かを問わないこととし,このような理解は,道路交通条約の改正は要さず,現行の道路交通条約の解釈上可能であることを確認しました。
つまり,この合意により,現行の道路交通条約の下でも,遠隔操作による公道実証実験が可能であることが確認されました。
4 関連記事
5 参考文献
the Convention on Road Traffic(1949)
the Convention on Road Traffic(1968)
ECE/TRANCE/WP.1/149/Add.1
ECE/TRNS/WP.1/145
ECE/TRANS/WP.1/2015/8
ECE/TRANS/WP.1/153
6 引用文献
本記事は,中川由賀「自動運転導入後の交通事故の法的責任の変容~刑事責任と民事責任のあり方の違い~」『中京Lawyer』Vol.25,p.41,2016年から一部引用しています。

コメント
コメントは停止中です。